love.physics.newPrismaticJoint
Creates a PrismaticJoint between two bodies.
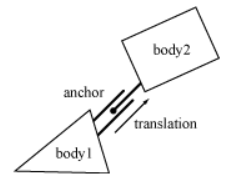
A prismatic joint constrains two bodies to move relatively to each other on a specified axis. It does not allow for relative rotation. Its definition and operation are similar to a revolute joint, but with translation and force substituted for angle and torque.
Function
Available since LÖVE 0.8.0
This variant is not supported in earlier versions.
Synopsis
joint = love.physics.newPrismaticJoint( body1, body2, x, y, ax, ay, collideConnected )
Arguments
Body body1- The first body to connect with a prismatic joint.
Body body2- The second body to connect with a prismatic joint.
number x- The x coordinate of the anchor point.
number y- The y coordinate of the anchor point.
number ax- The x coordinate of the axis vector.
number ay- The y coordinate of the axis vector.
boolean collideConnected (false)- Specifies whether the two bodies should collide with each other.
Returns
PrismaticJoint joint- The new prismatic joint.
Function
Available since LÖVE 0.8.0
This variant is not supported in earlier versions.
Synopsis
joint = love.physics.newPrismaticJoint( body1, body2, x1, y1, x2, y2, ax, ay, collideConnected )
Arguments
Body body1- The first body to connect with a prismatic joint.
Body body2- The second body to connect with a prismatic joint.
number x1- The x coordinate of the first anchor point.
number y1- The y coordinate of the first anchor point.
number x2- The x coordinate of the second anchor point.
number y2- The y coordinate of the second anchor point.
number ax- The x coordinate of the axis unit vector.
number ay- The y coordinate of the axis unit vector.
boolean collideConnected (false)- Specifies whether the two bodies should collide with each other.
Returns
PrismaticJoint joint- The new prismatic joint.
Function
Available since LÖVE 0.10.2
This variant is not supported in earlier versions.
Synopsis
joint = love.physics.newPrismaticJoint( body1, body2, x1, y1, x2, y2, ax, ay, collideConnected, referenceAngle )
Arguments
Body body1- The first body to connect with a prismatic joint.
Body body2- The second body to connect with a prismatic joint.
number x1- The x coordinate of the first anchor point.
number y1- The y coordinate of the first anchor point.
number x2- The x coordinate of the second anchor point.
number y2- The y coordinate of the second anchor point.
number ax- The x coordinate of the axis unit vector.
number ay- The y coordinate of the axis unit vector.
boolean collideConnected (false)- Specifies whether the two bodies should collide with each other.
number referenceAngle (0)- The reference angle between body1 and body2, in radians.
Returns
PrismaticJoint joint- The new prismatic joint.
Function
Removed in LÖVE 0.8.0
This variant is not supported in that and later versions.
Synopsis
joint = love.physics.newPrismaticJoint( body1, body2, x, y, ax, ay )
Arguments
Body body1- The first body to connect with a prismatic joint.
Body body2- The second body to connect with a prismatic joint.
number x- The x coordinate of the anchor point.
number y- The y coordinate of the anchor point.
number ax- The x coordinate of the axis unit vector.
number ay- The y coordinate of the axis unit vector.
Returns
PrismaticJoint joint- The new prismatic joint.
Please login to continue.