love.physics.newRevoluteJoint
Creates a pivot joint between two bodies.
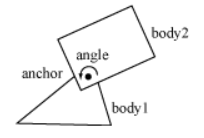
This joint connects two bodies to a point around which they can pivot.
Function
Available since LÖVE 0.8.0
This variant is not supported in earlier versions.
Synopsis
joint = love.physics.newRevoluteJoint( body1, body2, x, y, collideConnected )
Arguments
Body body1- The first body.
Body body2- The second body.
number x- The x position of the connecting point.
number y- The y position of the connecting point.
boolean collideConnected (false)- Specifies whether the two bodies should collide with each other.
Returns
RevoluteJoint joint- The new revolute joint.
Function
Available since LÖVE 0.10.2
This variant is not supported in earlier versions.
Synopsis
joint = love.physics.newRevoluteJoint( body1, body2, x1, y1, x2, y2, collideConnected, referenceAngle )
Arguments
Body body1- The first body.
Body body2- The second body.
number x1- The x position of the first connecting point.
number y1- The y position of the first connecting point.
number x2- The x position of the second connecting point.
number y2- The y position of the second connecting point.
boolean collideConnected (false)- Specifies whether the two bodies should collide with each other.
number referenceAngle (0)- The reference angle between body1 and body2, in radians.
Returns
RevoluteJoint joint- The new revolute joint.
Function
Removed in LÖVE 0.8.0
This variant is not supported in that and later versions.
Synopsis
joint = love.physics.newRevoluteJoint( body1, body2, x, y )
Arguments
Body body1- The first body to connect with a Revolute Joint.
Body body2- The second body to connect with a Revolute Joint.
number x- The x position of the connecting point.
number y- The y position of the connecting point.
Returns
RevoluteJoint joint- The new revolute joint.
Please login to continue.